Interfaccia per i servomotori di Robi
Grazie alla grande esperienza e passione di Adriano Gandolfo e all'idea originaria di RoboMic, troviamo sul sito di Adrirobot come costruirci in casa la scheda di comando da collegare ai servomotori di Robi e da usare col programma Servotester presentato qualche mese fa sulle pagine di Lab Robot.
IC1 = 74HC125P
IC2 = LPM335X + 2 pin strip femmina 1x4
R1 = 100Ώ 1/4W
R2 = 1kΏ 1/4W
SV1 = Pin strip 1x3 femmina
Una manciata di componenti che permettono di creare una scheda pulita e funzionale (una basetta millefori basterà al nostro scopo).


L'unico componente che non viene nominato nella lista è l'adattatore per il connettore del servomotore. Esso può essere realizzato acquistando i seguenti componenti:
CS = circuito stampato adattatore in vendita sul sito di Futura Elettronica (Cod. prodotto 7300-SOT23DIP6)



Descrizione del funzionamento
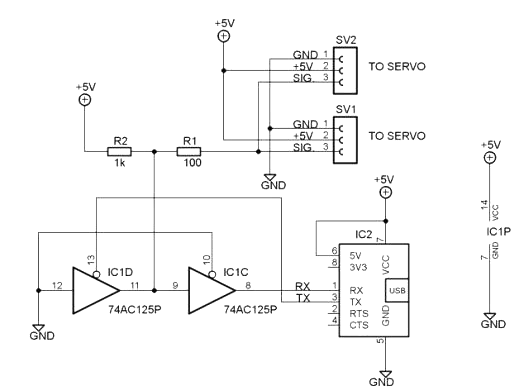
La versione della scheda tester proposta da Adrirobot è simile a quella di RoboMic e presenta un sistema di tipo half-duplex, ovvero una comunicazione di segnale che può essere definita "walkie talkie". Quando la trasmissione da un lato è stata completata, viene interrotta ed inizia la comunicazione dall'altra parte. In questo modo possiamo essere sicuri che solo una delle due parti è in trasmissione mentre l'altra resta in attesa, questo perchè entrambe le trasmissioni utilizzano la medesima frequenza.Schema del circuito e lista componenti
Questo il semplice schema che ci permetterà di creare la scheda da interfacciare con Robi, più in basso troviamo la lista dei componenti che la compongono.IC1 = 74HC125P
IC2 = LPM335X + 2 pin strip femmina 1x4
R1 = 100Ώ 1/4W
R2 = 1kΏ 1/4W
SV1 = Pin strip 1x3 femmina
Una manciata di componenti che permettono di creare una scheda pulita e funzionale (una basetta millefori basterà al nostro scopo).
L'unico componente che non viene nominato nella lista è l'adattatore per il connettore del servomotore. Esso può essere realizzato acquistando i seguenti componenti:
CS = circuito stampato adattatore in vendita sul sito di Futura Elettronica (Cod. prodotto 7300-SOT23DIP6)
CA = connettore per circuito stampato con innesto a scatto, identico a quello presente nella scheda nativa di Robi, può essere acquistato sul sito di Farnell (
Cod. prodotto 1684117)
Questo circuito ci permetterà di non sacrificare un cavo di Robi, ecco i componenti del connettore.
Ecco i componenti di questo connettore in parata
Un suggerimento per disporre i componenti sulla basetta millefori
Una volta costruito il tutto non vi resta altro che installare il driver per far funzionare la scheda LPM335X.
La procedura da seguire è molto semplice:
- scaricare il pacchetto driver dal sito del produttore cliccando qui e scompattare il file in una cartella
- collegare la scheda al pc tramite porta USB ed attendere che la periferica venga rilevata
- iniziare l'installazione guidata, scegliendo di installare i driver da un percorso specifico
- sfogliare tra le cartelle del proprio pc e selezionare quella nella quale avete scompattato i driver (punto 1)
- fatto ciò nella gestione delle periferiche troverete una porta seriale (COM) appena creata che è appunto la nostra scheda LPM335X
Non vi resta che collegare la scheda che avete costruito al servomotore che volete comandare ed il gioco è fatto!
Buon lavoro e buon divertimento :)

Commenti
Posta un commento